IEEE Society of Robotics and Automation's Technical Committee on:Networked Robots
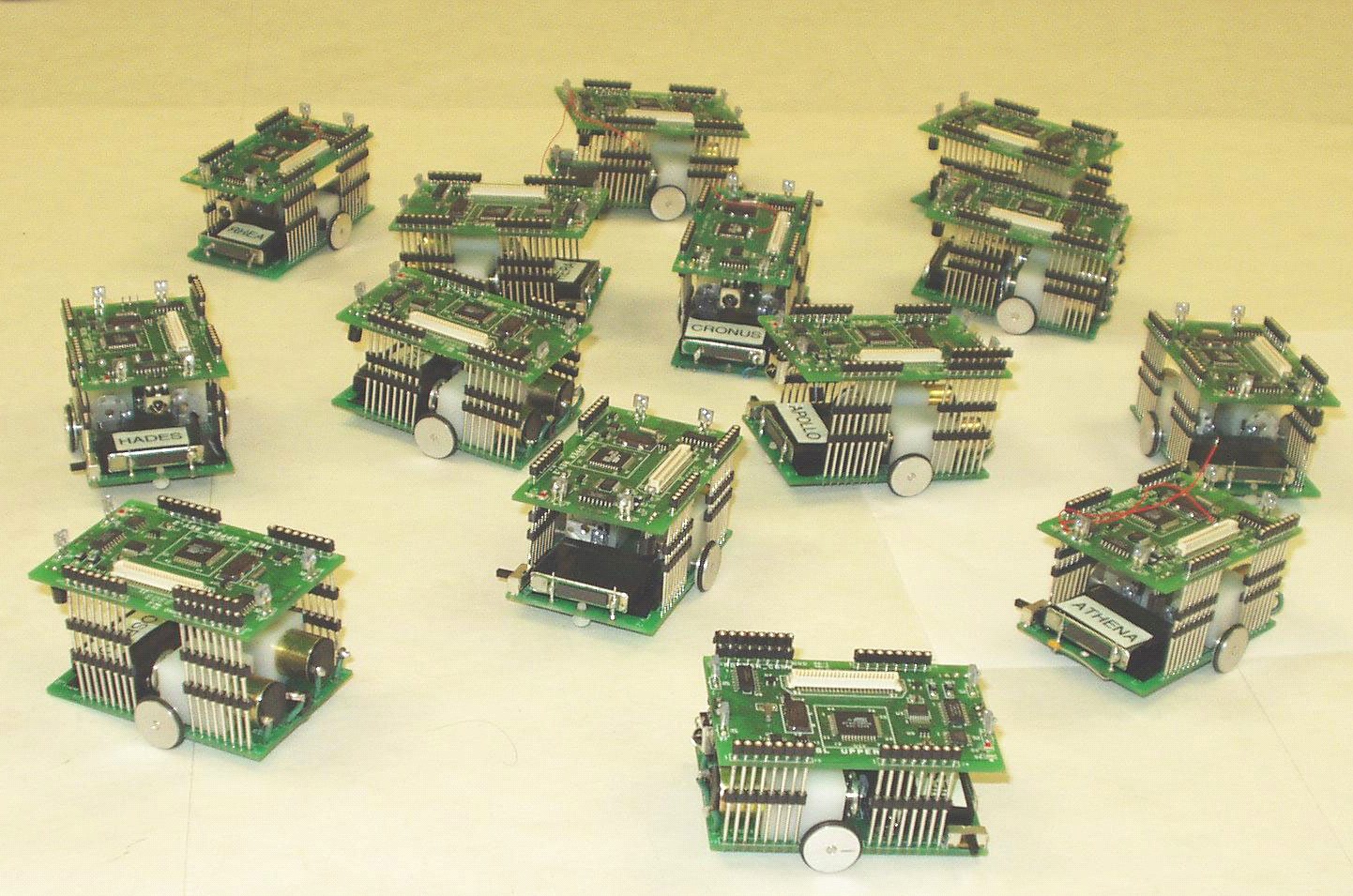
The Robomotes: A Mininature Networked Robot Testbed (courtesy Robotic Embedded Systems Lab, USC) A "networked robot" is a robotic device connected to a communications network such as the Internet or LAN. The network could be wired or wireless, and based on any of of a variety of protocols such as TCP, UDP, or 802.11. Many new applications are now being developed ranging from automation to exploration. There are two subclasses of Networked Robots: 1) Tele-operated, where human supervisors send commands and receive feedback via the network. Such systems support research, education, and public awareness by making valuable resources accessible to broad audiences. 2) Autonomous, where robots and sensors exchange data via the network. In such systems, the sensor network extends the effective sensing range of the robots, allowing them to communicate with each other over long distances to coordinate their activity. The robots in turn can deploy, repair, and maintain the sensor network to increase its longevity, and utility. A broad challenge is to develop a science base that couples communication to control to enable such new capabilities. Networked robots pose a number of technical challenges related to network noise, reliability, congestion, fixed and variable time delay, stability, passivity, range and power limitations, deployment, coverage, safety, localization, sensor and actuation fusion, and user interface design. New capabilities arise frequently with the introduction of new hardware, software, and protocol standards. The IEEE RAS Technical Committee on Internet and Online Robots was founded in May 2001 by Ken Goldberg and Roland Siegwart. It originally focused on Internet-based tele-operated robots, but expanded to reflect a broader set of problems and applications. The name Networked Robots was approved and adopted in May 2004.
Activities:
Founding Members:
We maintain a mailing list of over 300 members to report experiments, projects, and new initiatives. Anyone is welcome to join by sending email to the corresponding chairs. | |||