Satellite Images and Climate Change
Jonathan Rogness
University of Minnesota
What is a Satellite Image?
Satellites have sensors which respond to light power.
- Increased Light ⇒ Increased Voltage
- Analog voltage converted to a digital number (DN), usually 0-255 or 0-1023.
Different sensors respond to different kinds of light: red, green, blue, infrared light...
Different Satellites
LandSat: carries two different "cameras."
- MSS: 4 sensors
- TM: 7 sensors
AVHRR (Advanced Very High Resolution Radiometer)
Spatial Resolutions
The spatial resolution of a sensor is the size of the smallest detectable feature.
- LandSat MSS: ~ 80m
- LandSat TM: ~ 30m
- AVHRR: 1km
LandSat: images have more detail, but the data sets are huge. Coverage only repeats every 18 days.
AVHRR: images can have daily coverage and are more reasonable for large projects, but can't detect small features.
Problems with Large Resolutions
If your satellite has a large spatial resolution, you run the risk of your pixels including so many things that it's meaningless!
From DNs to Images
The light measurements can be displayed as a grayscale image, where 0 is black and 255 is White.
Otherwise we create "color composite" images.
Monitoring Climate Change
Satellite images can monitor environmental changes in a number of ways, including:
- Overhead pictures
- Tracking health of vegetation
- Tracking types of vegetation and land use
True Color Composites

|
| Band | Displayed As |
|---|
|
|
| Red | Red |
| Green | Green |
| Blue | Blue |
|
False Color Composites

|
| Band | Displayed As |
|---|
|
|
| NIR | Red |
| Red | Green |
| Green | Blue |
|
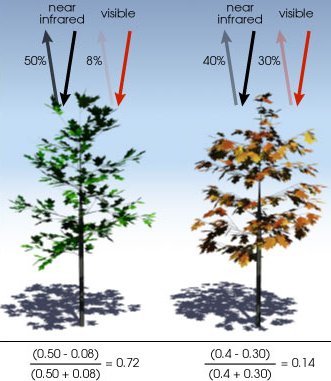
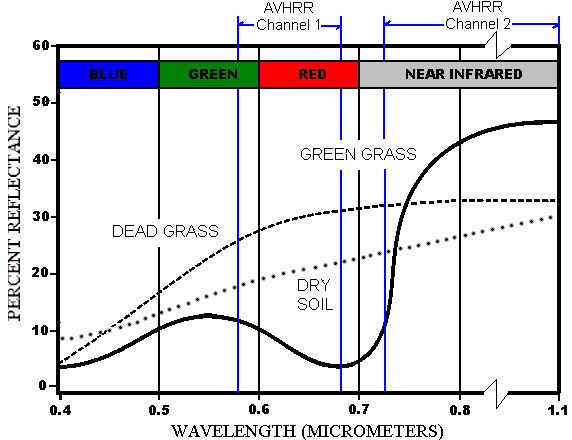
Vegetation
Healthy vegetation tends to absorb visible red light (AVHRR Ch1) but reflect NIR (AVHRR Ch 2). This leads to NDVI:
| N | ormalized |
| D | ifference in |
| V | egetation |
| I | ndex |
Definition. NDVI of a pixel = (NIR - Red) / (NIR + Red).
Minnesota NDVI, June 1992

Land Cover Classification
This has been done globally on a 1km scale with AVHRR data, and a 30m scale in the US with LandSat TM data. There are two ways to classify pixels, supervised and unsupervised.
Supervised Classification
Idea: use previous knowledge to help the computer recognize certain spectral signatures.
Cloud Detection
Harder than you'd think!
There are too many cloud types to reliably recognize every "cloud spectral signature;" Besides, we can't do LCC for every pixel ever beamed down. We need fast run-time cloud detection techniques.
We tend to use quick "threshold tests." If a pixel fails, say, 3 out of 5 tests, we say it's a cloud.
CLouds from AVhRr (CLAVR)
Includes tests like:
- RGC: is Ch1 > 44% ?
- RR: is 0.9 < (Ch2/Ch1) < 1.1 ?
- TGC: is "temperature" < 249K ?
Cloud edges are hard to detect, so CLAVR is often done on a 2x2 grid.
- 0 pixels cloud: all 4 "clear"
- 1-3 pixels cloud: all 4 "mixed"
- 4 pixels cloud: all 4 "cloud"
CLAVR Results