
Main navigation | Main content
|
|
|
 |
 "..although we have a mess of problems, we have great capacity - intellect and resources - to do some thing about them" -- Henry Ford II (1917 - 1987) |
Research Themes
The Minnesota Sensor System Group focuses on the system research in wireless sensor networks. Our research passion lies in resolving real world problems. Specifically we are aiming at three major interleaved efforts: 1) sensor network middleware service support for multi-dimensional awareness, 2) in-situ sensor system modeling and enhancement, and 3) architecture, system, language and development support for large-scale integrated sensor network systems. The essential research goal in the long term is how to make the right sensor data available at right time and location for the right users efficiently.
Sponsored Research:
Obtaining Realistic Communication and Sensing In-situ Models for Wireless Embedded Systems Sponsored by NSF
Essentia: Architecting Sensor Systems with Asymmetric Function Placement and Reflective Composition Sponsored by NSF
The Sensor Network Development and Deployment Studio Sponsored by NSF
Energy Profiling with mPlatform Sponsored by Microsoft Research
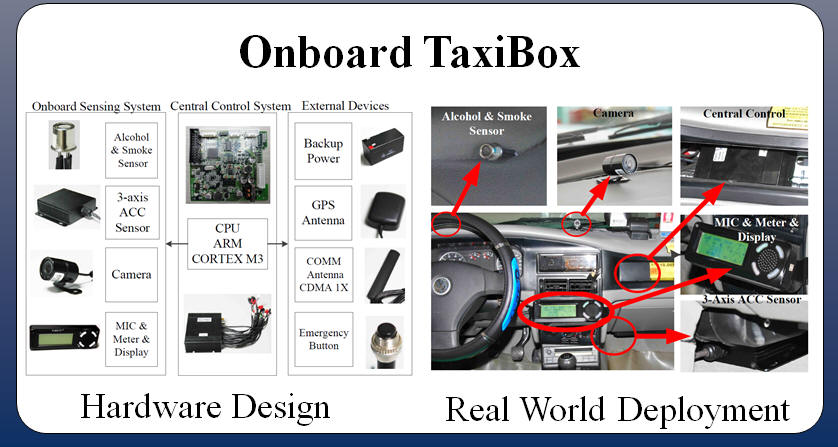 |
TaxiBox consists of three main parts: central control system, onboard sensing system, and external devices. With various onboard sensors, a dispatching center is capable of monitoring the comprehensive physical status of a taxicab on streets. Various external devices can be integrated into our Taxi- Box. Some external devices in the current TaxiBox design include (i) a display and a speaker integrated to the display; (ii) a traditional fare meter for fare calculation and receipt printing; (iii) backup power for a situation in which the main power is not available; (iv) an emergency button; (v) a GPS module with a separate GPS antenna; and (vi) a CDMA 1X communication module with a separate antenna. This design and usage of this device has been reported in BIGDATA 203, SENSYS 2012 and SenSys 2013 [PDF ]. | |
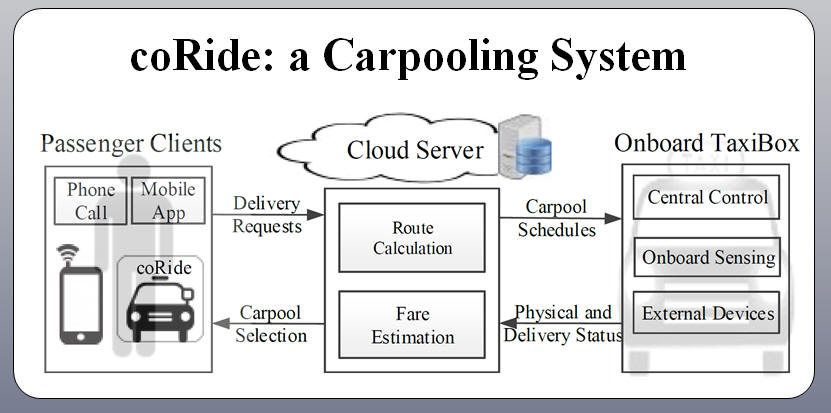 |
Carpooling has long held the promise of reducing gas consumption by decreasing mileage to deliver co-riders. In this work, we present coRide in a large-scale taxicab network intended to reduce total mileage for less gas consumption. Our coRide system consists of three components, a dispatching cloud server, passenger clients, and an onboard customized TaxiBox device. In the coRide design, in response to the delivery requests of passengers, dispatching cloud servers calculate cost-efficient carpool routes (Ratio-2 optimal) for taxicab drivers and thus lower fares for the individual passengers. We evaluate coRide with a real world dataset of more than 14,000 taxi- cabs, and the results show that compared with the ground truth, our service can reduce 33% of total mileage; This system has been reported in SenSys 2013 [PDF ]. | |
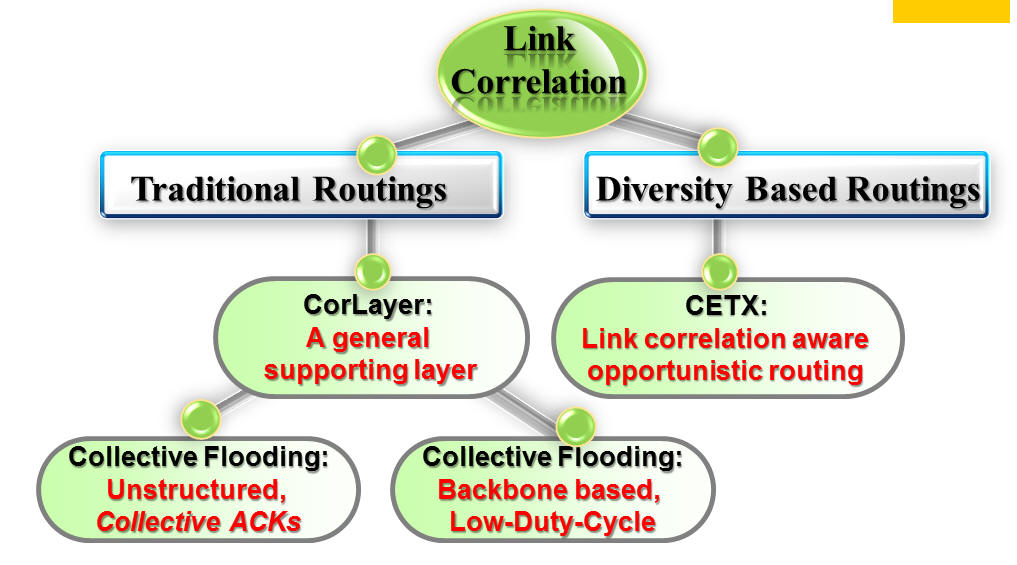 |
To understand how environments impact wireless communication, researchers have studied extensively on the packet reception quality of individual wireless links in real-world environments. In contrast, little research has been done to investigate the reception correlation of wireless links and its related impact on network-layer performance, despite the fact that wireless communication essentially occurs in a broadcast medium with concurrent receptions. To address this gap, we propose an in-depth systematic study to cover a large design space from empirical measurement, modeling, and impact analysis to design and implementation of protocols that exploit spatiotemporal patterns of link pathcorrelation. The inital work has been reported in NSDI 2010 and MobiCom 2013 | |
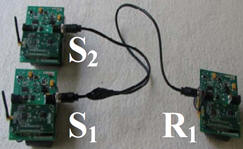  |
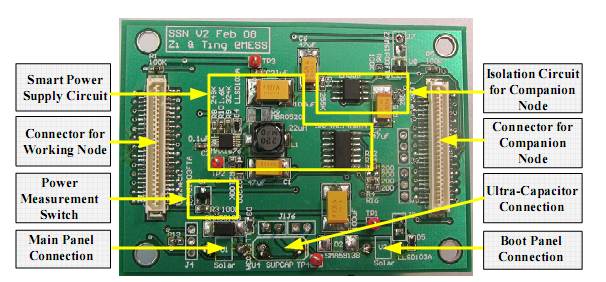
eShare supports the concept of energy sharing among multiple devices by providing designs for energy routers (i.e., energy storage and routing devices) and related energy access and network protocols. In a nutshell, energy routers exchange energy sharing control information using their data network while sharing energy freely among connected devices using their energy network. We extensively evaluate our system under six real-world settings and the result has been reported in ACM SenSys 2010 [PDF]. | |
 |
|
|
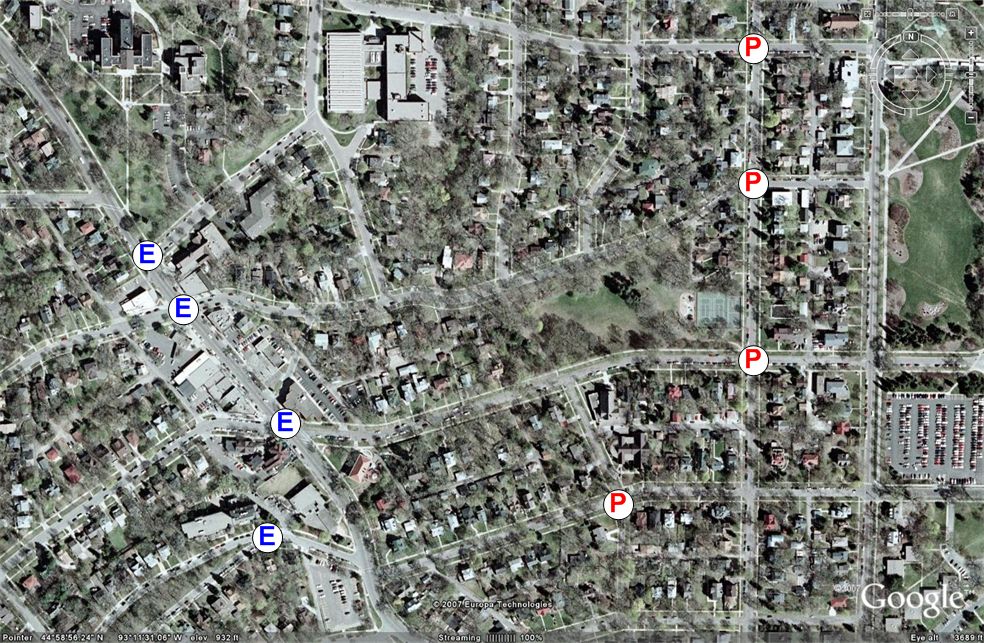 |
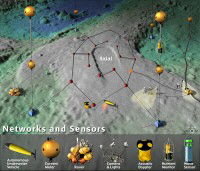
 In
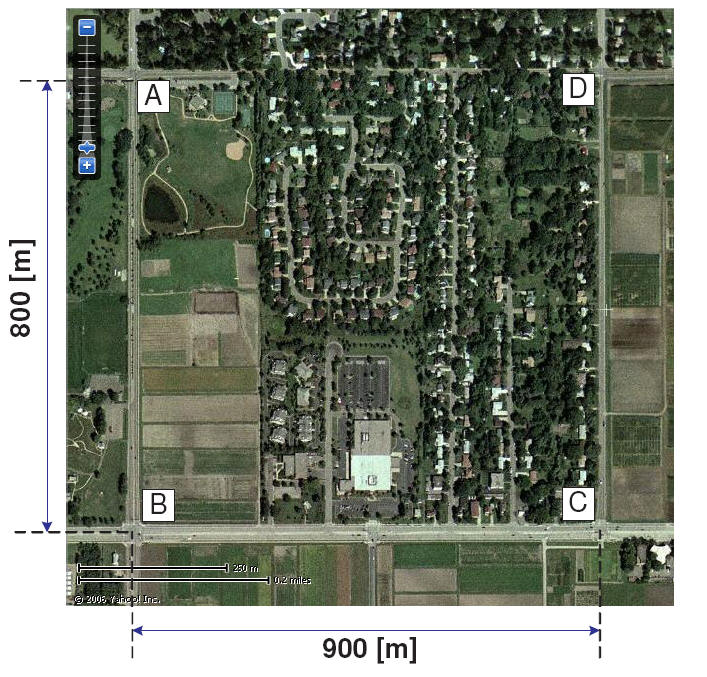
road networks, wireless sensors are deployed along the road ways for
surveillance. This project proposes a virtual scanning algorithm, called
VISA. We consider the surveillance scenario that entrance points on road
map are specified as possible vehicle entrances and protection points
are specified as important points before which vehicles should be
detected. We guarantee the detection of moving vehicles entering
entrance points of label E on the road network before they reach
protection points of label P. Our objective is to maximize the lifetime
of the sensor network deployed on the road network, satisfying such a
detection guarantee. We construct a virtual graph composed of vertices
and edges where the vertices are road intersections, protection points
and entrance points and the edges are distances along with the number of
sensors deployed on the road segments. This virtual graph is used to
determine each sensor's duty cycle consisting of the working schedule
and sleeping schedule. We evaluate our design outdoor in Minnesota
roadways and show the detection guarantee despite of some sensing holes
due to the absence of sensors. This system has
been reported in Infocom 2009. [PDF] In
road networks, wireless sensors are deployed along the road ways for
surveillance. This project proposes a virtual scanning algorithm, called
VISA. We consider the surveillance scenario that entrance points on road
map are specified as possible vehicle entrances and protection points
are specified as important points before which vehicles should be
detected. We guarantee the detection of moving vehicles entering
entrance points of label E on the road network before they reach
protection points of label P. Our objective is to maximize the lifetime
of the sensor network deployed on the road network, satisfying such a
detection guarantee. We construct a virtual graph composed of vertices
and edges where the vertices are road intersections, protection points
and entrance points and the edges are distances along with the number of
sensors deployed on the road segments. This virtual graph is used to
determine each sensor's duty cycle consisting of the working schedule
and sleeping schedule. We evaluate our design outdoor in Minnesota
roadways and show the detection guarantee despite of some sensing holes
due to the absence of sensors. This system has
been reported in Infocom 2009. [PDF] |
|
|
|
 In
road networks, sensor nodes are deployed sparsely (hundreds of meters
apart) to save costs. This makes the existing localization solutions
based on the ranging ineffective. To address this issue, we introduce an
Autonomous Passive Localization (APL) scheme. Our work is inspired by
the fact that vehicles move along routes with a known map. Using
vehicle-detection timestamps, we can obtain distance estimates between
any pair of sensors on roadways to construct a virtual graph composed of
sensor identifications (i.e., vertices) and distance estimates (i.e.,
edges). The virtual graph is then matched with the topology of road map,
in order to identify where sensors are located in roadways. We evaluate
our design in local roadways and simulated environments, where we found
no location matching error, even with a maximum sensor time
synchronization error of 0.3sec and the vehicle speed deviation of
10km/h.. In
road networks, sensor nodes are deployed sparsely (hundreds of meters
apart) to save costs. This makes the existing localization solutions
based on the ranging ineffective. To address this issue, we introduce an
Autonomous Passive Localization (APL) scheme. Our work is inspired by
the fact that vehicles move along routes with a known map. Using
vehicle-detection timestamps, we can obtain distance estimates between
any pair of sensors on roadways to construct a virtual graph composed of
sensor identifications (i.e., vertices) and distance estimates (i.e.,
edges). The virtual graph is then matched with the topology of road map,
in order to identify where sensors are located in roadways. We evaluate
our design in local roadways and simulated environments, where we found
no location matching error, even with a maximum sensor time
synchronization error of 0.3sec and the vehicle speed deviation of
10km/h..This system has been reported in Infocom 2008. [PDF] |
|
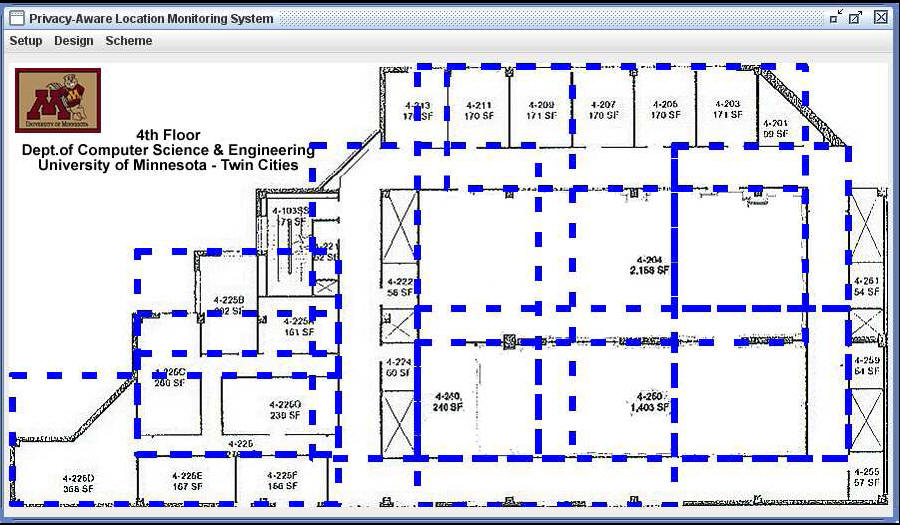 |
 proposes two in-network distributed algorithms, namely Minimum Resource
and Optimal Area that aim to preserve personal privacy in such areas
while maintaining the monitoring functionality. Both algorithms reply on
the well established privacy concept of k-anonymity; Although both
proposed algorithms provide same privacy guarantees, the Minimum
Resource aims to do so with minimum possible number of exchanged
messages between sensor nodes while the Optimal Area algorithm aims to
maintain the highest quality of monitoring functionality. Furthermore,
to accommodate the system users mobility, we propose an incremental
maintenance scheme for both algorithms that aims to avoid redundant
reevaluation of privacy guarantees. The proposed system is evaluated
with a network of 39 MICAz motes on a physical test-bed, and an
extensive simulation of 1,000 sensor nodes. [Demo Video]
proposes two in-network distributed algorithms, namely Minimum Resource
and Optimal Area that aim to preserve personal privacy in such areas
while maintaining the monitoring functionality. Both algorithms reply on
the well established privacy concept of k-anonymity; Although both
proposed algorithms provide same privacy guarantees, the Minimum
Resource aims to do so with minimum possible number of exchanged
messages between sensor nodes while the Optimal Area algorithm aims to
maintain the highest quality of monitoring functionality. Furthermore,
to accommodate the system users mobility, we propose an incremental
maintenance scheme for both algorithms that aims to avoid redundant
reevaluation of privacy guarantees. The proposed system is evaluated
with a network of 39 MICAz motes on a physical test-bed, and an
extensive simulation of 1,000 sensor nodes. [Demo Video] |
|
|
|
|
 |
 Multi-Sequence Positioning (MSP) is designed and implemented for sensor
node localization in outdoor environments. The novel idea behind MSP is
to reconstruct and estimate two-dimensional (or 3D) location information
for each sensor node by processing multiple easy-to-get one-dimensional
node sequences obtained through a loosely guided event distribution. We
have realized the MSP idea through two physical systems (indoor and
outdoor version) with totally over 60 MICAZ motes. This evaluation
demonstrates that MSP can achieve sub-feet-level accuracy, requiring
neither additional hardware on sensor nodes nor precise event
distribution. It also provides a nice tradeoff between physical costs
(anchors) with soft cost (events) while maintaining localization
accuracy.[Demo Video] Multi-Sequence Positioning (MSP) is designed and implemented for sensor
node localization in outdoor environments. The novel idea behind MSP is
to reconstruct and estimate two-dimensional (or 3D) location information
for each sensor node by processing multiple easy-to-get one-dimensional
node sequences obtained through a loosely guided event distribution. We
have realized the MSP idea through two physical systems (indoor and
outdoor version) with totally over 60 MICAZ motes. This evaluation
demonstrates that MSP can achieve sub-feet-level accuracy, requiring
neither additional hardware on sensor nodes nor precise event
distribution. It also provides a nice tradeoff between physical costs
(anchors) with soft cost (events) while maintaining localization
accuracy.[Demo Video]This system has been reported in SenSys 2007. [PDF ] |
|
|
|
This system has been reported in SenSys 2007. [PDF ] |
|
|
|
 defines a Unified Sensing Coverage Architecture, which features three novel ideas: Asymmetric Architecture, Generic
Switching and Global Scheduling. uSense provides sensing coverage
through a creative separation of scheduling from switching. We design
and implement sophisticated scheduling algorithms externally and
represent such intelligence with a lightweight generic switching
algorithm running at resource-constrained sensor nodes. As an instance
of these scheduling algorithms, we propose a novel two-level scheduling
algorithm, called uScan. We evaluate our architecture with a network of
30 MicaZ motes, an extensive simulation with 10,000 nodes. The results
indicate that uSense is a promising architecture to support flexible and
efficient coverage in sensor networks. defines a Unified Sensing Coverage Architecture, which features three novel ideas: Asymmetric Architecture, Generic
Switching and Global Scheduling. uSense provides sensing coverage
through a creative separation of scheduling from switching. We design
and implement sophisticated scheduling algorithms externally and
represent such intelligence with a lightweight generic switching
algorithm running at resource-constrained sensor nodes. As an instance
of these scheduling algorithms, we propose a novel two-level scheduling
algorithm, called uScan. We evaluate our architecture with a network of
30 MicaZ motes, an extensive simulation with 10,000 nodes. The results
indicate that uSense is a promising architecture to support flexible and
efficient coverage in sensor networks. This system has been reported in ICDCS 2007 [PDF ] and MobiCom SRC competition 2006 |
|
 |
This system won the best paper award in the 2nd International Conference on Mobile Ad-hoc and Sensor Networks (MSN 2006) [PDF ] |
|
|
|
In this project we design and implement a framework, called StarDust, for wireless sensor network localization based on passive optical components. In the StarDust framework, sensor nodes are equipped with optical retro-reflectors. An aerial device projects light towards the deployed sensor network, and records an image of the reflected light. An image processing algorithm is developed for obtaining the locations of sensor nodes. For matching a node ID to a location we propose a constraint-based label relaxation algorithm. We propose and develop localization techniques based on four types of constraints: node color, neighbor information, deployment time for a node and deployment location for a node. This system has been reported in SenSys06 [PDF ] |
|
|
|
 uses the spatio-temporal properties of well
controlled events in the network (e.g., light), to obtain the locations
of sensor nodes. We demonstrate that a high accuracy in localization can
be achieved without the aid of expensive hardware on the sensor nodes,
as required by other localization systems. Through performance
evaluations of a real system deployed outdoors, we obtain a 20cm
localization error. A sensor network, with any number of nodes, deployed
in a 2500m2 area, can be localized in under 10 minutes, using a device
that costs less than $1000. To the best of our knowledge, this is the
first report of a sub-meter localization error, obtained in an outdoor
environment, without equipping the wireless sensor nodes with
specialized ranging hardware. uses the spatio-temporal properties of well
controlled events in the network (e.g., light), to obtain the locations
of sensor nodes. We demonstrate that a high accuracy in localization can
be achieved without the aid of expensive hardware on the sensor nodes,
as required by other localization systems. Through performance
evaluations of a real system deployed outdoors, we obtain a 20cm
localization error. A sensor network, with any number of nodes, deployed
in a 2500m2 area, can be localized in under 10 minutes, using a device
that costs less than $1000. To the best of our knowledge, this is the
first report of a sub-meter localization error, obtained in an outdoor
environment, without equipping the wireless sensor nodes with
specialized ranging hardware.
This system has been reported in SenSys05 [PDF ][Demo Video] |
|
|
|
|
This Page was last modified by 10/28/2013
Authors: Tian He

 is
a large indoor sensor network test-bed,
supporting up to 360 nodes. The whole test-bed is composed of six 4 feet
by 8 feet boards. Each board in the system can be used as an individual
sub-system, because each board is designed to be separately powered,
separately controlled and separately metered. Each individual
board can support up to 60 nodes, therefore, the whole system can
support up to 360 nodes working simultaneously. In the first phase of
construction, three high-end HIT HITCPX1250 projectors are used to
generate event (it is capable to create mirage ). In the
second phase of construction, motorize objects are introduced to
create another sets of mobile targets. The ultimate goal of this testbed
is to allow researchers to conduct all kinds of system research locally
and remotely with realistic sensing modality as inputs. The first
phase of construction is finished during 2007. In the second phase,
mobility support will be added.
is
a large indoor sensor network test-bed,
supporting up to 360 nodes. The whole test-bed is composed of six 4 feet
by 8 feet boards. Each board in the system can be used as an individual
sub-system, because each board is designed to be separately powered,
separately controlled and separately metered. Each individual
board can support up to 60 nodes, therefore, the whole system can
support up to 360 nodes working simultaneously. In the first phase of
construction, three high-end HIT HITCPX1250 projectors are used to
generate event (it is capable to create mirage ). In the
second phase of construction, motorize objects are introduced to
create another sets of mobile targets. The ultimate goal of this testbed
is to allow researchers to conduct all kinds of system research locally
and remotely with realistic sensing modality as inputs. The first
phase of construction is finished during 2007. In the second phase,
mobility support will be added.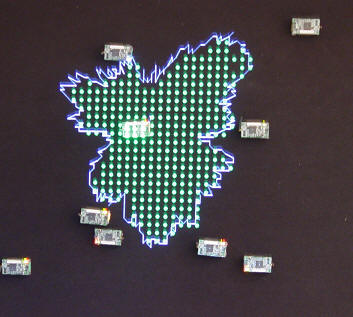

 Despite the well-known fact that
in reality sensing patterns are highly irregular, researchers continue
to develop protocols with simplifying assumptions of circular 0/1
sensing models. In this project, we design and implement two Sensing
Area Modeling (SAM) techniques useful in the real world. P-SAM provides
accurate sensing area models for individual nodes using controlled or
monitored events, while V-SAM provides continuous sensing similarity
models using natural events in an environment. Evaluation under
real-world settings reveal several serious issues concerning circular
models, and demonstrate significant improvements in several applications
when SAM is used.
Despite the well-known fact that
in reality sensing patterns are highly irregular, researchers continue
to develop protocols with simplifying assumptions of circular 0/1
sensing models. In this project, we design and implement two Sensing
Area Modeling (SAM) techniques useful in the real world. P-SAM provides
accurate sensing area models for individual nodes using controlled or
monitored events, while V-SAM provides continuous sensing similarity
models using natural events in an environment. Evaluation under
real-world settings reveal several serious issues concerning circular
models, and demonstrate significant improvements in several applications
when SAM is used.
 In this
project, we design and test a methodology for navigation of mobile
wireless sensor networks and fast target acquisition without a map,
called GraDrive. Our approach integrates per-node prediction with global
collaborative prediction to estimate the position of a stationary target
and to direct mobile nodes towards the target along the shortest path.
We demonstrate that a high accuracy in localization can be achieved much
faster than existing navigation models without any assistance from
stationary sensor networks.
In this
project, we design and test a methodology for navigation of mobile
wireless sensor networks and fast target acquisition without a map,
called GraDrive. Our approach integrates per-node prediction with global
collaborative prediction to estimate the position of a stationary target
and to direct mobile nodes towards the target along the shortest path.
We demonstrate that a high accuracy in localization can be achieved much
faster than existing navigation models without any assistance from
stationary sensor networks. 




 is one of the major efforts in
the sensor network community to build an integrated sensor network
system for surveillance missions. The focus of this effort is to acquire
and verify information about capabilities and positions of targets. Such missions often involve a high element of risk for human
personnel and require a high degree of stealthiness. Hence, the ability
to deploy unmanned surveillance missions, by using wireless sensor
networks, is of great practical importance. In this
work, we design and implement a complete running system, called VigilNet, for energy-efficient surveillance. It currently consists about 40,000
lines of NesC and Java code, running on XSM, Mica2 and Mica2dot
platforms. The complete system is designed to scale to at least 1000 XSM
motes and cover minimal 100x1000 square meters to ensure operational
applicability. We evaluate middleware and system performance extensively
on a network of 203 MICA2 motes.
is one of the major efforts in
the sensor network community to build an integrated sensor network
system for surveillance missions. The focus of this effort is to acquire
and verify information about capabilities and positions of targets. Such missions often involve a high element of risk for human
personnel and require a high degree of stealthiness. Hence, the ability
to deploy unmanned surveillance missions, by using wireless sensor
networks, is of great practical importance. In this
work, we design and implement a complete running system, called VigilNet, for energy-efficient surveillance. It currently consists about 40,000
lines of NesC and Java code, running on XSM, Mica2 and Mica2dot
platforms. The complete system is designed to scale to at least 1000 XSM
motes and cover minimal 100x1000 square meters to ensure operational
applicability. We evaluate middleware and system performance extensively
on a network of 203 MICA2 motes.